


금속판 절단을 위한 고속 6축 산업용 로봇
TSR070-07-A 암의 대칭구조를 이용하여 진동발생이 쉽지 않습니다. 4, 5, 6축에는 초박형 중공 감속기 구동 장치가 있어 작고 정교하여 작업이 용이합니다.
설명
기본정보
| 모델 번호. | TSR070-07-A |
| 사용 | 3c 생산 라인 |
| 기능 | 용접 |
| 유효 탑재량 | 6kg |
| 운송 패키지 | 목재 포장 |
| 사양 | TSR070-07-A |
| 등록 상표 | 톱스타 |
| 기원 | 중국 본토 |
| HS 코드 | 8428904000 |
| 생산 능력 | 1000 |
상품 설명
TSR070-07-A팔의 대칭 구조로 인해 진동이 발생하기가 쉽지 않습니다. 4, 5, 6축은 초박형 중공 감속기 구동장치를 채택하여 작고 정교하여 작은 공간에서도 작업이 가능합니다.
특징
고속
높은 정밀도
높은 안정성
강력한 확장성
소프트웨어 모션 제어 기술
제어와 시각화의 결합
EtherCAT 버스 제어 시스템
쉬운 설치
사양
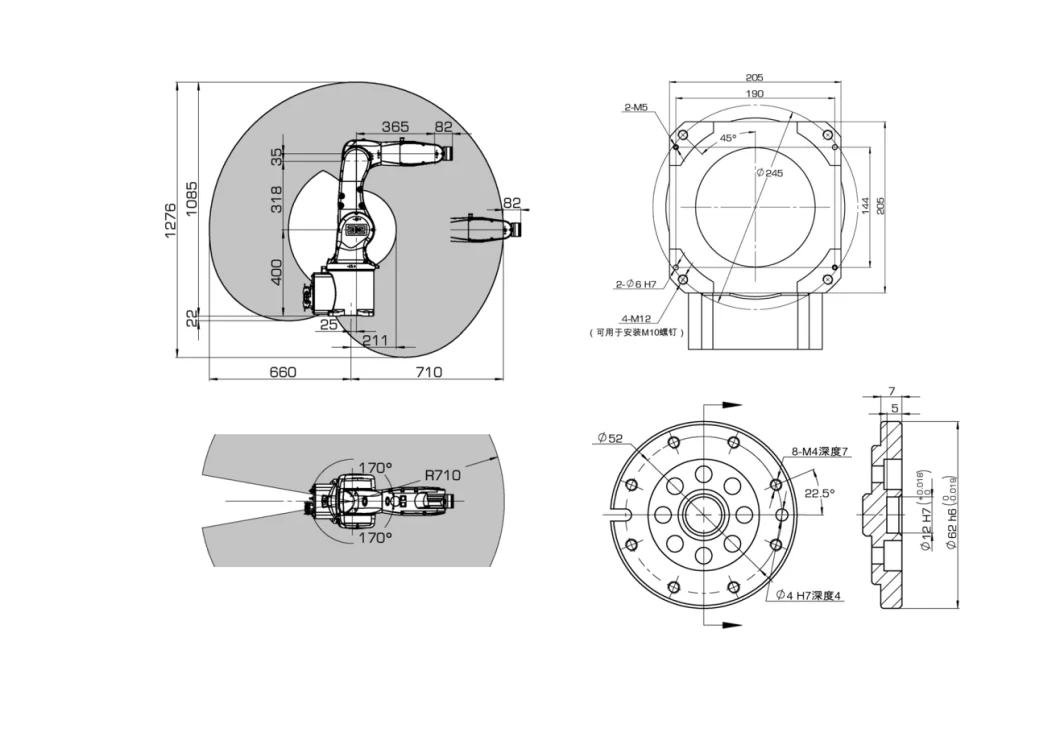
| 로봇 모델 | TSR071-06-A/TSR070-07 |
| Armform | 수직다관절 |
| 이동의 자유 | 6개의 축 |
| 유효 탑재량 | 6kg |
| 반복 위치 정확도 | ±0,02mm |
| 최대 리프트 | 710mm |
| 체중 | 45kg |
| 설치 방법 | 모든 각도 |
| IP 수준 | IP65 |
직장

제어 캐비닛1. EnterCAT 버스 제어 기술은 EnterCAT 버스를 전체 시스템의 통신 회선으로 사용하여 높은 안정성, 높은 전송 속도, 간단한 배선 및 쉬운 확장을 제공합니다2. WINDOWS 실시간 커널PC+실시간 커널+소프트웨어 제어 기술로 원활한 작동 및 호환성 보장, 40% 비용 절감3. 강력한 시뮬레이션 기능: 현장 사용을 보호하고 프로그래밍 효율성을 50% 향상시키며 운영 프로세스의 실패율을 줄이기 위한 실시간 온라인 시뮬레이션 및 오프라인 프로그래밍 시뮬레이션 기능입니다. (국내 로봇 제어 시스템 유일)4. 소프트웨어 모션 제어 커널 핵심 기술을 습득하고 높은 비용 없이 시장의 지속적인 경쟁력을 보장하기 위해 로봇 모션 제어 알고리즘을 완전히 독립적으로 연구 및 개발합니다.

규칙
- 로봇 서보 제어 기술에 집중
- Soft-SPS 기능
- 광범위한 주변 기능


당사 연락처
지금 보내




